
















")









. Công nghệ Scan laser trên không
Công nghệ Scan laser từ máy bay (Airborne Laser Scanning) hay còn gọi là Lidar (Light Detection and Ranging) là công nghệ mới được áp dụng tại Việt Nam, cho phép đo đạc độ cao chi tiết địa hình một cách nhanh chóng và chính xác.
Hệ thống Lidar bao gồm bộ đầu Scan (bộ cảm biến), hệ thống đo quán tính (IMU), hệ thống GPS, hệ thống quản lý bay, hệ thống camera số và hệ thống các thiết bị lưu trữ dữ liệu. Bộ máy Scan laser (bộ cảm biến): gồm hai bộ phận được gắn vào bên dưới máy bay: một bộ phận có vai trò phát xung laser hẹp đến bề mặt trái đất trong khi máy bay di chuyển với tốc độ nhất định. Một máy thu gắn trên máy bay sẽ thu nhận phản hồi của những xung này khi chúng đập vào bề mặt trái đất và quay trở lại thiết bị thu trên máy bay. Hầu hết các hệ thống Lidar đều sử dụng một gương Scan để tạo ra một dải xung. Sóng Laser nằm trong dải sóng cận hồng ngoại để phục vụ công tác đo đạc địa hình, bề mặt trên mặt đất, còn với laser dải sóng xanh lá cây phục vụ công tác đo sâu dưới mặt nước. Độ rộng của dải Scan phụ thuộc vào góc dao động của gương, và mật độ điểm mặt đất phu thuộc vào các yếu tố như tốc độ máy bay và tốc độ dao động gương. Tốc độ dao động được xác định bằng cách tính toán tổng thời gian tia laser rời máy bay, đi đến mặt đất và trở lại bộ cảm biến. Hệ thống xác định quán tính IMU: Các giá trị góc xoay, góc nghiêng dọc, nghiêng ngang, hướng bay Scan của hệ thống Lidar được xác định chính xác bằng thiết bị đạo hàng, góc quay gương tức thời và các khoảng cách thu nhận và dữ liệu GPS được dùng để tính toán tọa độ ba chiều của các điểm Lidar. Hệ thống GPS: Dữ liệu Lidar được kết hợp với các thông tin vị trí chính xác thu nhận từ thiết bị GPS và hệ thống thiết bị xác định các thông số định hướng góc xoay, góc nghiêng dọc, nghiêng ngang cùng đặt trên máy bay. Các thông tin này được lưu trữ và xử lý, để xác định giá trị tọa độ (x,y,z) chính xác của mỗi điểm trên mặt đất. Hệ thống GPS cung cấp thông tin về vị trí và thời điểm thu nhận tín hiệu Lidar. Hệ thống GPS bao gồm một máy thu đặt trên máy bay và một máy thu đặt tại mặt đất quá trình xử lý dữ liệu này cho ra kết quả vị trí điểm có độ chính xác cao.

Ngoài các thiết bị chính, hệ thống Lidar còn bao gồm các thiết bị ngoại vi khác như hệ thống lưu trữ, giao diện điều khiển thiết bị, điều khiển bay, bộ cấp nguồn. Một hệ thống Lidar thông thường được tích hợp một máy ảnh số kích thước trung bình, một số còn trang bị máy quay video để theo dõi vùng chụp và mây. Khi được tích hợp với máy ảnh số cỡ trung bình, có thể tiến hành đồng thời quá trình Scan Lidar và chụp ảnh số của một khu vực. quy trình này giúp giảm chi phí bay chụp, thu được các sản phẩm: trực ảnh, mô hình số độ cao và có thể tạo được mô hình thành phố ba chiều.
* Nguyên lý hoạt động:
Hệ thống Lidar xác định được tọa độ các điểm trong không gian ba chiều X,Y, Z bằng cách đo độ dài của tia laser, xác định góc phương vị của tia laser (dựa vào các góc xoay của thiết bị và góc quay của gương Scan được xác định bằng hệ thống IMU và hệ tọa độ GPS lựa chọn tại thời điểm Scan laser. Thiết bị Lidar có độ rộng dải Scan có thể từ vài chục mét đến hàng trăm mét phụ thuộc vào chiều cao bay và đặc biệt nhờ vào góc quay của tấm gương đước gắn vào đầu thiết bị phát tia laser hướng về phía bề mặt địa hình. Tia laser hoạt động theo nguyên lý xung điện có tần số lớn tới vài Khz. Sau khi phát, năng lượng sẽ được phản hồi từ địa hình, địa vật qua hệ thống quang học tới đầu thu của thiết bị xung điện. Dựa vào khoảng chênh lệch thời gian T giữa tín hiệu phát đi và tín hiệu thu về, chúng ta xác định được chiều dài D của tia laser tại thời điểm Scan.
2. Công nghệ Scan laser trên mặt đất
Có thể nói công nghệ Scan laser trên mặt đất (TLS 3D – Terrestrial Laser Scanning) là cuộc cách mạng trong thu thập số liệu thực địa phục vụ cho các ứng dụng 3 chiều. Ngày nay trong tất cả các ngành, số liệu 3D đã trở thành chuẩn trong thiết kế, trình bày, sản xuất. Công nghệ TLS 3D cho phép tất cả mọi yếu tố trong cuộc sống như môi trường, con người, cảnh quan, thiết bị máy móc, công trình dân dụng, giao thông … đều được thu nhận và thể hiện bằng hình ảnh ba chiều đúng như chúng đang tồn tại trong thực tiễn. Đo đạc thực địa công nghệ số trên thế giới đã áp dụng kỹ thuật TLS 3D kết hợp với phần mềm xử lý số liệu để hợp thành giải pháp đo đạc, khảo sát thực địa mà không có bất kỳ thiết bị nào có thể so sánh được. Những ứng dụng của công nghệ TLS 3D đã chứng tỏ một điều rằng, khả năng ứng dụng của giải pháp thu thập số liệu này không hạn chế.
* Nguyên lý hoạt động:
TLS 3D là thuật ngữ chỉ tất cả các ứng dụng Scan đối tượng bằng tia laser được thực hiện từ những điểm cố định (điểm khống chế) trên bề mặt trái đất các thiết bị TLS 3D sử dụng cho các dự án dân dụng có thể áp dụng một trong số những công nghệ sau để xác định chính xác khoảng cách tới các đối tượng:
– “Thời gian di chuyển – Time of Flight”.
– “Cơ sở pha – Phase Based”.
– “Xử lý hình dạng sóng – Waveform Processing”.
Về cơ bản, nguyên tắc hoạt động của TLS 3D cũng giống như cơ chế hoạt động của các máy toàn đạc điện tử thế hệ mới: sử dụng tốc độ ánh sáng để xác định khoảng cách. Tuy nhiên, vẫn có sự khác biệt cơ bản trong bước sóng của tia sáng laser, số lượng và tốc độ ghi nhận số liệu các điểm đo, các bước đo thực địa, xử lý số liệu, nguồn sai số… Các hệ thống Scan Scan laser 3D thu thập được một khối số liệu thô khổng lồ có tên gọi “Đám Mây Điểm – Point Cloud”.
Đám mây điểm là thuật ngữ dùng để chỉ một tập hợp các điểm đo mang đầy đủ thông số X, Y, Z mô tả lại chính xác mô hình 3 chiều của tất cả các đối tượng trong thực tiễn khi tia laser của máy Scan laser 3 chiều mặt đất Scan qua. Mỗi đám mây có thể từ một vài triệu cho tới hàng trăm triệu điểm đo, đây chính là lý do dẫn tới tên gọi “Đám Mây Điểm” (hay Point Cloud). Thuật ngữ “Đám Mây Điểm” hiện đã trở nên quen thuộc trên khắp thế giới và mức độ phổ biến của thuật ngữ này cũng như tiềm năng của công nghệ Scan 3D mặt đất dẫn tới việc tất cả các hãng sản xuất phần mềm, có liên quan ít nhiều tới lĩnh vực đồ hoạ thiết kế 3D đều đã bổ sung thêm các chức năng hỗ trợ đọc và tải lên các định dạng của số liệu đám mây điểm.
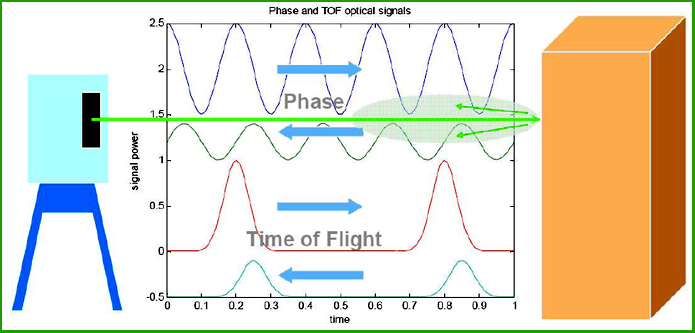
Máy Scan công nghệ “Time of Flight” (cũng có thể gọi bằng tên khác “Pulse Based” là kiểu máy Scan laser phổ biến nhất trong đo đạc dân dụng bởi tia Scan có khả năng đi xa nhất (chuẩn từ 125 đến 1000 mét) và tốc độ thu thập số liệu đạt tới 50.000 điểm mỗi giây hoặc cao hơn nữa. Thiết kế của máy Scan laser “Time of Flight” chính là thiết bị tích hợp của các hợp phần:
– Hợp phần phát laser tạo ra trùm tia;
– Tấm gương lệch để hướng trùm tia laser về phía đối tượng hay khu vực Scan;
– Hệ thống máy thu quang học thứ cấp để xác định tín hiệu laser phản xạ lại từ các đối tượng Scan.
Theo đó tốc độ di chuyển của ánh sáng là giá trị đã biết, thời gian di chuyển của tín hiệu laser có thể chuyển đổi thành số liệu đo khoảng cách chính xác.




")



{kind=link}